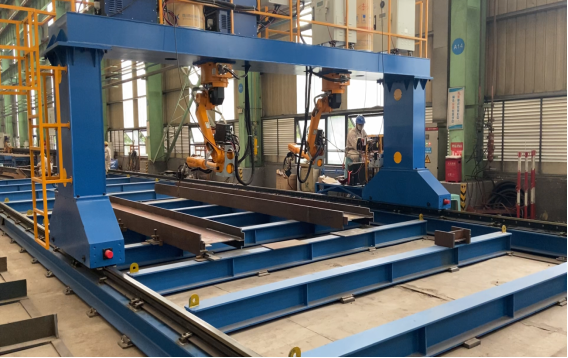
龙门式双头焊接机器人

二、设备说明
1.设备系统概述
地轨式单机智能焊接工作站主要用于各类钢结构角焊缝的机器人自动化焊接,工作站满足 H 型钢结构、
横隔板等角焊缝焊接要求。
每套地轨焊接工作站包括控制系统、地轨行走机构、弧焊机器人、焊接电源及冷却水箱、智能焊接视
觉系统、水冷焊枪以及清枪站等。
1.工作站功能综述
1)工作站工作过程:

2)系统能够满足每天二班(每班 8 小时)正常工作,并能保持稳定的精度。
3)工作站的设计图纸经过反复的论证及仿真设计,各个部件的设计强度可靠、装配维修方便,在保
证功能的前提下,保证了外形的美观。
4)工作站设备的所有外购件均为行业内知名厂家提供(详见配置清单),所有加工件的质量都经过严
格的把关、强度达标、性能优越和运动平稳。
5)工作站设备的零件和仪表及全部图纸资料的度量单位均采用国标单(GB)标准;所有仪表、零部
件的设计、制造及所用材料应符合 ISO和IEC标准或其他同等标准。
6)工作站零部件选用 材料制造,所选用的机械、电气元件是 的、成熟的、可靠的系列产品。
7)机器人前端有防碰撞传感器,在发生碰撞时能及时停机保护,同时根据需求可配置自动清枪剪丝
系统。
8)工作站参数化建模、三维数模驱动、智能规划焊接路径、激光视觉传感器拍照修正路径、超出限
制偏差范围报警、匹配参数及工艺库自动创建焊接程序等智能化焊接功能。
2.智能操作系统







我们自主开发系统,其主要功能是通过将焊接工艺进行深度集成,导入三维模型,通过视觉系统对整个
构件焊缝准确定位,依据模型中的位置实际轮廓, 自动生成焊接程序。
软件部署在 PC 系统上,PC 系统可以放置在任何位置,通过无线路由可以实现远程控制,即在办公室
可以直接操作现场设备进行焊接。
3.设备清单
单套地轨焊接工作站 工作站数量:1 台套 | ||||||
序号 | 分项 | 名称/描述 | 单位 | 数量 | 品牌/厂家 | 备注 |
1 | 机器人系统 | 焊接机器人 | 套 | 1 | 库卡 | BR-2010A Pro |
2 | 订制线缆 | 套 | 1 | 库卡 | ||
3 | 控制柜 | 套 | 1 | 库卡 | ||
4 | 焊接设备 | 数字脉冲焊机 | 套 | 1 | 麦格米特 | DEX2 500MPR |
5 | 订制线缆 | 套 | 1 | 麦格米特 | ||
6 | 水冷焊枪 | 套 | 1 | 特尔玛 | TRM602W HD | |
7 | 清枪站 | 套 | 1 | 北京金雨 | ||
8 | 行走系统 | 全封闭地轨 | 条 | 1 | 库卡 | JHY6100A-9 |
9 | 伺服外部轴 | 套 | 1 | 库卡 | 2.2kw 驱动器 | |
10 | 伺服电机 | 套 | 1 | 库卡 | 130/2.2kw | |
11 | 订制线缆 | 套 | 1 | 库卡 | ||
12 | 视觉系统 | BCW600P | 套 | 1 | 梅卡曼德 | 复合相机 |
13 | 软件 | 操作台 | 套 | 1 | 库卡 | |
14 | 智能操作系统 | 套 | 1 | 柏楚 | ||
4.设备配置
4.1 焊接机器人系统基本组成:

4.2 工作站布局方案

4.3 焊接机器人:BR-2010A Pro


运动范围与杆长参数

机器人控制系统相关参数
功能单元 | 规格项目 | 技术指标 |
主电源 | 额定电压 | 三相交流 380V±10% |
供电频率 | 50Hz~60Hz,波动范围±5% | |
整机功率 | 3.5kW | |
IO 扩展版 | 数字量输出 | 20 路 PNP 高电平输出 |
数字量输入 | 27 路 NPN 低电平输入(IN1-IN3 可切换成高电平有效) | |
模拟量输出 | 4 路 0-10v 模拟量输出( 输出负载能力 50mA) | |
PWM 输出信号接 口 | PWM 信号电平为 24v 或 5v 可选。 | |
总线主机 | USB 接口 | 6 路标准 USB3.0 接口 |
Ethernet | 3 路,接口位于控制器,标准 RJ45 接口。可以用来链接网络 设备(如网络摄像头,带网络通讯的激光器等)、交换机等 | |
EtherCAT | 1 路,支持远程 IO 模块,ANYBUS 网关模块扩展、焊机等 | |
DVI-I 显示接口 | 可以用于接显示,兼容数字信号和模拟信号。 | |
RS232 接口 | 可用于连接 RS232 串口通讯设备 | |
控制柜外形尺寸 | W555mm×D560mm×H1165mm(不包含航插) | |
重量 | 125kg | |
环境 | 电柜防护等级 | IP54,散热单元 IP30 |
冷却方式 | 风冷 | |
安装方式 | 立放 | |
使用场所 | 室内,不受阳光直射,无尘埃、腐蚀性气体、可燃性气体、 油雾、水蒸气、滴水或盐分等 | |
使用环境温度 | 0℃~45℃ | |
使用环境湿度 | 80%RH,无凝露(40℃) | |
通讯功能
通讯功能 | 是 否 具 备 | 补充说明 |
TCP/IP 通讯 | √ | 支持 SOCKET 通讯作为服务器或客户端,支持字符串的自由解析 |
Modbus-TCP | √ | 机器人作为 modbus-tcp 地从站(服务器),支持数据传输、外部启 动、状态读取 |
Ethernet/IP | √ | 机器人作为从站 |
EtherCAT | √ | 支持 EtherCAT 从站设备,支持 ANBUS 系列网关,使 EtherCAT 通讯 转换为其他总线协议 |
其他 | √ | 基于 TCP/IP 协议的固定格式的固定视觉通讯 |
4.4 9 米行走地轨

地轨参数
名称 | 地轨行走系统 |
安装环 境 | 温度 | -10-45℃ | |
型号 | JHY6100A-9 | 湿度 | 20-80% | ||
结构 | 地轨单机 | 震动 | 4.9m/s2 以下 | ||
负载 | 1000 公斤 |
其他 | 不可有引火性及腐蚀性气体、液体, 不可涉及水、油等,不可靠近高强 干扰源 | ||
定位精度 | ±0.5 毫米 | ||||
附轴数 | 1 | ||||
X 向轨道长度 | 9 米 | 行走速度 | 40m/min | ||
设备配置
品名 | 规格型号 | 品牌 | 说明 |
轨道主体 | JHY6100A-9 | 歆耀强 | 1000kg |
行星减速机 | TBK120-20 | 钛科马格 | |
伺服电机 | TDA130-06430FA1-11B00 | 歆耀强 | 2.2KW |
直线导轨 | 30 重载方型 | 台湾锐昇 | 6 组滑块 |
坦克链 | 65*200-R200 | 台湾 J@T | M3 斜齿 |
4.5 焊接电源
麦格米特 DEX2 500MPR


4.6 清枪站

功能特点
1) 清理焊接机器人在自动焊接作业过程中产生的粘堵在焊枪气体保护套内的飞溅物,确保气体长期畅通
无阻,有效地阻隔空气进入焊接区域,提高焊缝质量;
2) 清理导电咀上焊烟产生的积尘;
3) 清理衔接管上气体出气孔;
4) 为保护套喷洒清枪剂,降低焊渣对火口、导电嘴的死粘连,增加耐用度。
5) 减轻操作人员的工作量;
6) 防止人工清理不准时而影响焊接质量;
7) 防止人工清理重复拆装保护套使保护套和本体连接管之间的绝缘筒螺纹磨损,延长运用时间,降低成
本;
8) 防止因螺纹磨损招致气体保护套装置歪斜,气体导偏而形成维护失效。
4.7 水冷焊枪

考虑到工件的焊缝特点焊枪采用特尔玛机器人水冷焊枪,其主要由水冷枪颈及电缆组成。传统焊枪 的保护气只有一路,在保护气由喷嘴喷出时极易迅速散失,只能靠加大气体压力和流量来提高气保护效 果。新一代机器人焊枪创新地采用两路保护气设计,外层通道的保护气成轴向气流,而内层通道的保护
气成径向气流,在喷嘴内混合形成层流状保护。
由于加强了保护气的流动控制,使得焊接中气保护效果非常 ,焊缝质量提升,同时,保护气用 量也大大降低。同时两通道保护气可以到达焊枪内的多个部位,使焊枪的 冷却效果 加强,并且由于
径向气流的存在,使得导电嘴也 充分的冷却,避免导电嘴过度烧损,从而延长了导电嘴的寿命。
特点:
1)双路气管可以优化气体流通环境,提高了气体流通量。
2) 易耗件的超长使用寿命。
3)更 的双路水冷效果。
4)更高的焊接能力。
4.8 激光视觉传感器

参数 | 值 | 参数说明 | |
低视距 | 视野范围 | 550-750mm |
精准定位时使用 |
视距范围 | 160-220mm | ||
高视距 | 视野范围 | 750-1800mm |
初定位时使用 |
视距范围 | 220-550mm | ||
Y 方向分辨率 |
0.07mm | Y 方向拥有更高分辨率。测量焊缝水 平偏移更加准确 | |
Z 方向分辨率 | 低视距 | 0.3mm | 约等于大部分机器人的定位精度。
比绝大多数机器人轨迹精度要高。 |
高视距 | 1mm | ||
5.设备能耗
单机版用电量 | ||||
序号 |
设备名称 |
设备功率 |
单站数量 |
总能耗 kW |
1 | 焊接机器人 | 5.0 | 1 | 5.0 |
2 | 焊接行走轴 | 2.2 | 1 | 2.2 |
3 | 焊机 | 21.4 | 1 | 21.4 |
4 | 视觉、控制器 | 0.6 | 1 | 0.6 |
合计 | 29.2 | |||
三、项目团队

1.项目经理岗位职责
a.项目的 负责人,主控项目计划及整体进度控制、安全措施落实监督、质量控制监督;
b.参与项目的前期的技术交流,现场规划、布局、确认;
c.项目过程考核及项目组内组员奖金考核
d.与需方问题协调沟通及时向项目总监、项目助理汇报;
e.项目验收工作的推动及负责项目总结会的组织及召开。
2.技术经理岗位职责
a.项目技术负责人(控制、设计、工艺),对项目的技术方案可行性负责;
b.负责项目的技术交流及技术协议的签订工作;
c.项目过程中技术方案的优化及现场调试、技术配合。